Graph R-CNN for Scene Graph Generation

✏️ 제안
1. Graph R-CNN: 객체 <-> 이미지간의 관계 detecting
➞ Relation Proposal Network(RePN)
2. attentional Graph Convolutional Network
➞ obj & relation 사이 contextual 정보 파악
3. evaluation metric
➞ 존재하는 metric 보다 holistic & realistic ^^

Visual Scene
➞ 이미지 내 객체에 초점을 둔게 대부분
img classification | obj detection | segmentation
scene 을 객체간의 집합?collection으로 표현하면 관계를 파악하기 어려워
➞ obj 를 포함하고 있는 그래프로 이해하자
그래프 표현:
node = obj, edge = relationship 형태의 fully connected graph
객체수가 증가하면? 그래프 표현이 의미가... ㄴㄴ
Graph R-CNN (for scene graph generation)
1. obj node 추출 ➞ utilize standard obj detection pipeline[32] Faster R-CNN
2. relation edge pruing
3. graph context integration
Scene Graph
* Image region
* relationships:
- V: set of nodes corresponding to localized obj regions in I
- E: relationships between obj
- O: object , R; relationship labels
model을 다음과 같이 나타낼 수 있음


1. Object Region Proposal
Faster R-CNN으로 객체 영역 제안
객체 i와 관련 있는 영역 rio=[xi,yi,wi,hi]과 feature vector , class에 대한 확률분포 를 추출한다.
(classes = { 1, ..., k })
- spatial region
- feature vector
- class에 대한 확률분포 를 추출
2. Relationship Proposal Network
: (원래) vertex의 잠재적인 edge의 uniform random sampling 을 통해 구하는데
: 논문에서는 RePN 제안 > 전체 생성 프로세스를 end-to-end 방식으로 학습할 수 있도록 함
n개의 obj가 있을 때 O(n^2)개의 관계 만들어지는데
RePN -> pruning

(Φ(pio),ψ(pjo)는 sub, obj를 구별하기 위한 projection function)
> [poi, poj] 를 concate 해서 MLP 하는 방법도 있는데 메모리/계산량 측면에서 매우 그지같음
>>> asymmetric kernel fucntion 사용
Overlap 계산
두 객체 쌍 {u, v} & {p, q}

I: computed intersection area between 2 boxes
U: union area
모든 pair 는 sigmoid 를 거쳐 0 ~ 1 사이의 score 가져
내림 차순으로 정렬하고 K 개의 pair 에 대해 NMS 수행
결과 = sparse Graph = (V, E) 얻어
edge 에는 object pair 의 union box의 feature 추출한 visual representation 담긴다..
: number of relation)
나머지 m 객체 쌍은 관계 E를 가진 후보로 간주해 - G=(V, E) 그래프를 얻는다?
Vanila GCN
노드 i의 표현 zi: 모든 이웃 노드들 zj에 선형변환 가중치 aij 곱해 update
a는 0 ~ 1 사이의 값으로 feature의 symmmetically normalized adjacency matrix에 의해 미리 계산됨.
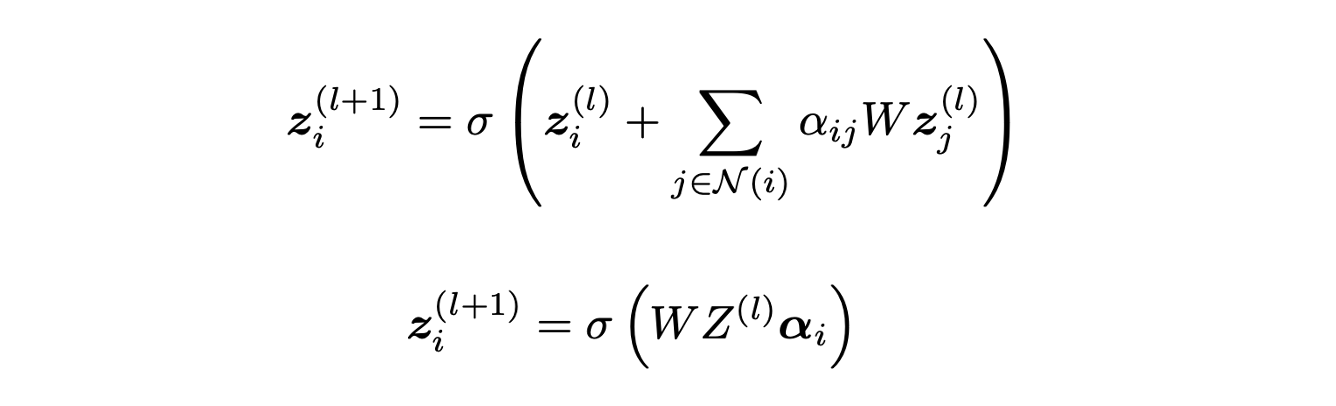
여기에 attention 을 도입하면
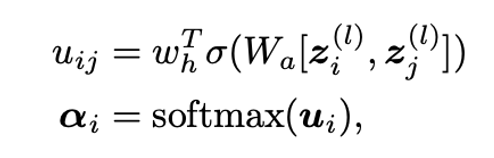
[* , *]: concatenation operation: concate 한 node feature 를 2 layer MLP에 통과 > softmax
== a를 구한다
* object node

* relationship node

N 개의 object node 와 m개의 relationships + 모든 object nodes 끼리 skip-connect edge를 연결시켜global context를 고려한 representation update
3. Graph labeling
: iterative refinement process
Loss function
- P(V | I )
- RPN과 동일한 loss: binary cross entropy loss
- P(E|V ,I)
- another binary cross entropy loss on relation proposals
- P(R,O|V,E,I)
- 2 multi-class cross-entropy losses
- object classification & predicate classification
Evaluating Scene Graph Generation
SGGen+ formulated:
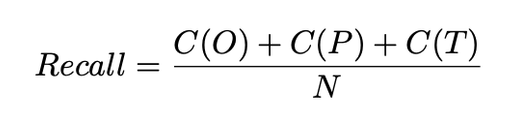
- C(O): number of object nodes correctly localized and recognized
- C(P): for predicate → depends on the location of the subject and object
- C(T): triplet
- N: number of entries (sum: objects, predicates, relationships)